USTC Robogame Competition Robot
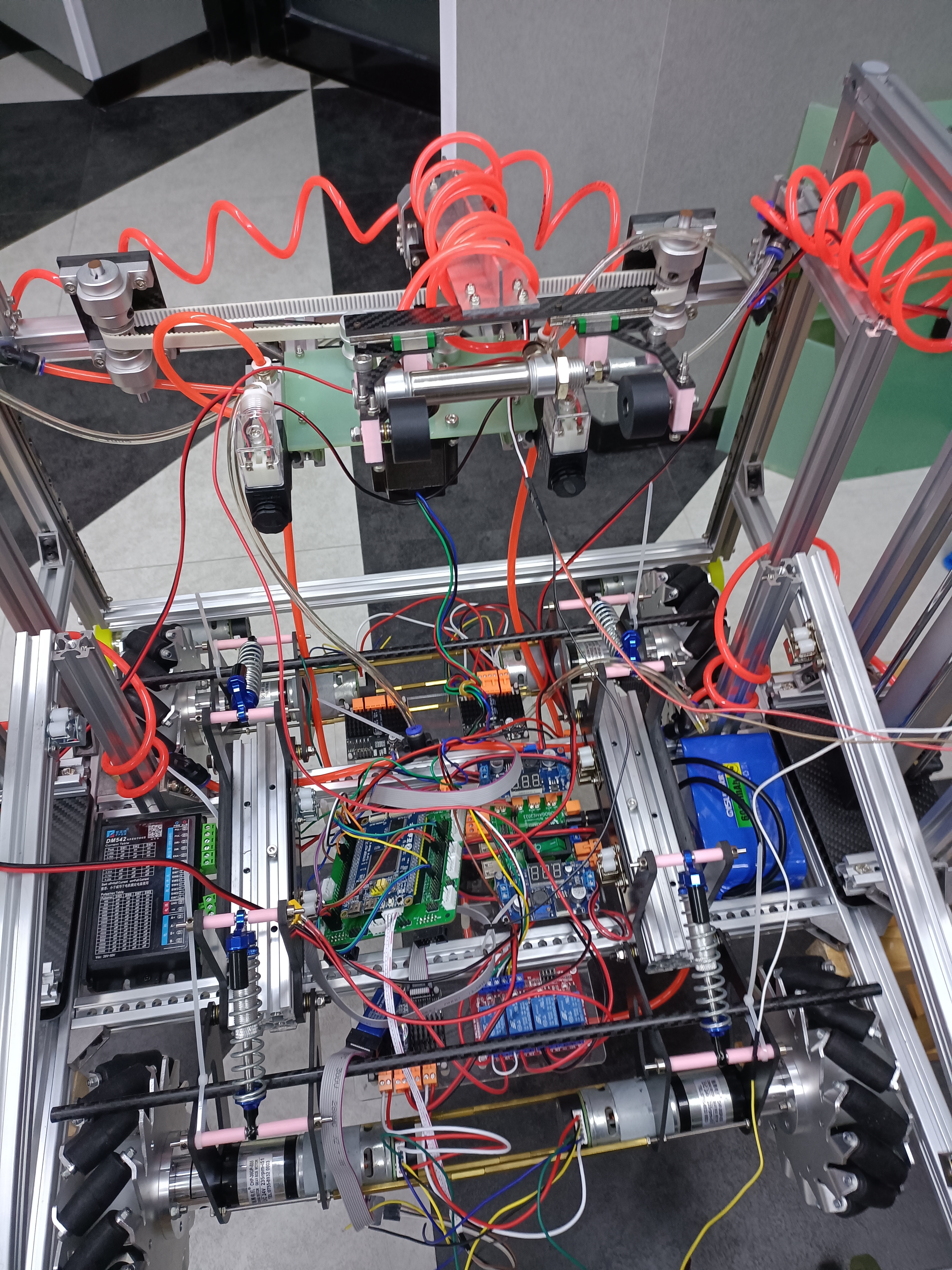
This is a robot we built to compete in the USTC robot competition Robogame. It is controlled by a STM32F407 MCU, using four Mecanum wheels to move around. A compressed air bottle is used to power the pneumatic gripper and help the robot climb up stairs. Using Computer Vision methods, the robot can locate and grab cube foam blocks and transport them to assigned locations.
We employed AprilTag to visually locate and navigate the robot to assigned locations. Designed and developed PCBs for robot control, providing interfaces for motor drives and wireless communications. Conducted wiring arrangement, as well as the MCU programming for robot control.
I learn about basic MCU programming, PID control algorithm, circuit design and manual machining using various tools.